Bit-Slice Design: Controllers and ALUs
by Donnamaie E. White
Copyright © 1996, 2001, 2002, 2008 Donnamaie E. White
- Pre-Introduction
- Selection of the Implementation
- Microprogramming
- Advantages of LSI
- The 2900 Family
- Language Interrelationships
- Controller Design
- Constructing the CCU
- Sequential Execution
- Multiple Sequences
- Start Addresses
- Mapping PROM
- Unconditional Branch
- Conditional Branch
- Timing Considerations
- Pipelining
- Improved Architecture
3. Adding Programming Support to the Controller
- Expanded Testing
- Subroutines
- Nested Subroutines
- Stack Size
- Loops
- Am29811
- Am2909/11
- CASE Statement (Am29803A)
- Microprogram Memory
- Status Polling
- Interrupt Servicing
- Implementation - Interrupt Request Signals
- Vector Mapping PROM
- Next Address Control
- Am2910
- Am2910 Instructions
- JZ, CONT, JMAP
- CJP, CJV, LDCT, JRP, CJS
- JSRP, CRTN, RPCT, PUSH
- LOOP, CJPP, TWB
- Control Lines
- Interrupt Handling
- Am2914
- Interconnection of the Am2914
6. The ALU and Basic Arithmetic
- Further Enhancements
- Instruction Fields
- Instruction Set Extensions
- Sample Operations
- Arithmetic -- General
- Multiplication with the Am2901
- Am2903 Multiply
IntroductionLast Edit October 10, 1996; July 9, 2001 Constructing the CCUNow that what the CCU must do - namely, translate the opcode received into ALU-ACC controls - is defined, how is the CCU constructed? Hardwired DesignAs stated before, the CCU can be built from the traditional sequential circuit network, an SSI/MSI hardwired unit. The advantages and justifications of this approach are as follows:
The disadvantages are as follows:
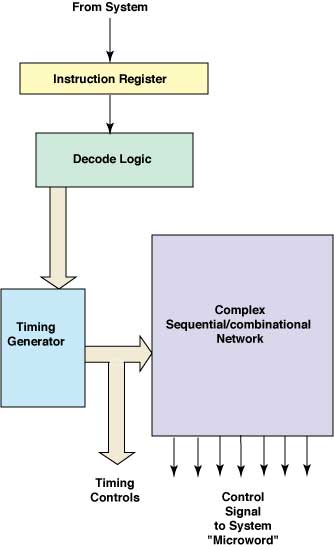
A hardwired control would consist of an instruction register (IR), decode logic, a timing generator network and a complex sequential-combinational network. Output from the network would be the control signals for the rest of the system, as shown in Figure 1-10. Figure 1-10 Typical Hard-wired (SSI/MSI) CCU
Microprogrammed DesignAssuming that the required speed has negated using MOS FIS microprocessors, the control can be done with microprogramming. The simplest microprogrammed computer control unit would require
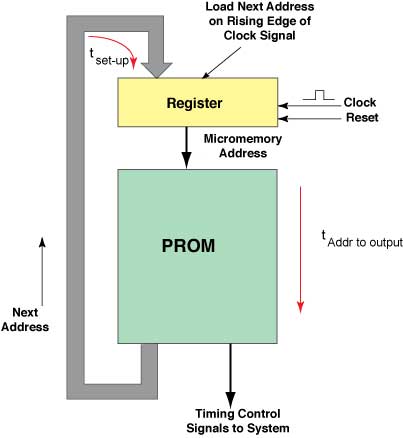
Output from the control memory would include the control signals for the rest of the system. If a control unit other than a CCU is being developed, the unit could be as simple as a register, a clock source, and a PROM-based control memory, as presented in Figure 1-11. Figure 1-11 Simplest Control Bit implementation. (Clock signal refers to the rising edge.)
The advantages and justifications of this approach are as follows:
For a hardwired design, the design time goes up as people are added to a project above some critical number, such as two or three people. Microprogrammed design can use groups operating in parallel, since the microcode and hardware development can generally proceed in parallel. Cost EffectivenessThe trend over time is for microprogramming to become the cost-effective method of control unit design at lower and lower levels of design complexity. The PDP-11 series of computers is a good example of this trend. The PDP-11/20 was designed when hardwired logic was more cost-effective for the level of "functionality" of the PDP-11; the PDP-11/60 was designed when microprogramming had become the more cost-effective choice. The PDP-11/60 has more control functions implemented via microprogramming than does the PDP-11/20, although the functionality (design complexity) of the systems are considered to be approximately equal. |